
Lavorano tra vigneti e campi di spinaci i primi due robot prototipali messi a punto da Yanmar nell’ambito del progetto “Smash”. Macchine autonome progettate in Italia dalla divisione ricera e sviluppo della Casa giapponese insieme a dieci aziende partner e volte a permettere nuovi livelli di precision farming attraverso l’incremento di rese, sostenibilità e protezione delle colture.

La pandemia scatenata dalla diffusione di Covid-19 ha dimostrato in maniera inequivocabile come ancora oggi l’Umanità sia spesso impotente davanti a enti biologici dalle dimensioni submicroscopiche. Un’impotenza che non ha impedito alla medicina di salvare migliaia di persone, ma che ha costretto comunque il Mondo a un’ibernazione socio-economica senza precedenti per evitare il collasso dei sistemi sanitari e i cui effetti sono lungi dall’essere al momento ancora compresi. Una situazione che però, è bene ricordare, nasce anche da una mancata risposta a decine di campanelli di allarme che negli ultimi decenni si sono manifestati sotto forma di epidemie locali gravi. Sars, influenza aviaria, Mers ed Ebola. Le pandemie non sono però l’unico fenomeno in grado di far collassare l’intera civiltà.

Esiste infatti un fenomeno di portata ancora più ampia che potrebbe ledere velocemente nei prossimi anni le attuali colonne portanti del Mondo, per lo meno quello che conosciamo, insito nei cambiamenti climatici. Sebbene non siano ancora state chiarite le dinamiche di base, lasciando aperto il dibattito tra i sostenitori delle cause antropiche e quelli delle cause naturali, gli effetti sono tangibili, soprattutto in agricoltura. Non è un caso quindi se proprio i cambiamenti climatici siano oggi identificati quali una delle sfide più importanti per l’agricoltura del futuro, insieme a quegli incrementi delle rese necessari per assecondare l’aumento della popolazione mondiale.
Onde evitare di ritrovarsi in una situazione simile a quella generata da Covid-19 sarebbe bene quindi prepararsi in anticipo, mettendo a punto tecnologie in grado di sostentare le realtà produttive agricole davanti a scenari climatici estremi. Tecnologie correlate a una maggior efficienza produttiva da sostenersi con l’implementazione di tecniche di precision farming sempre più efficaci e supportate da nuove generazioni di macchine, autonome e in grado di occuparsi sia del monitoraggio delle colture sia dei trattamenti delle piante. Guarda in tale direzione il progetto “Smash”, elaborato da Yanmar R&D Europe, divisione ricerca e sviluppo europea di Yanmar avente sede in Toscana vicino a Firenze. Acronimo di “Smart Machine for Agricultural Solutions Hightech” e finanziato con quattro milioni di euro dall’Unione Europea e dalla Regione Toscana punta allo sviluppo di una piattaforma robotica modulare in grado di ospitare un ampio range di sensori e attuatori che permettono di esaminare le piante e il suolo, fornire in tempo reale informazioni per la gestione della coltivazione e provvedere all’esecuzione di trattamenti e, in futuro, anche di operazioni leggere.

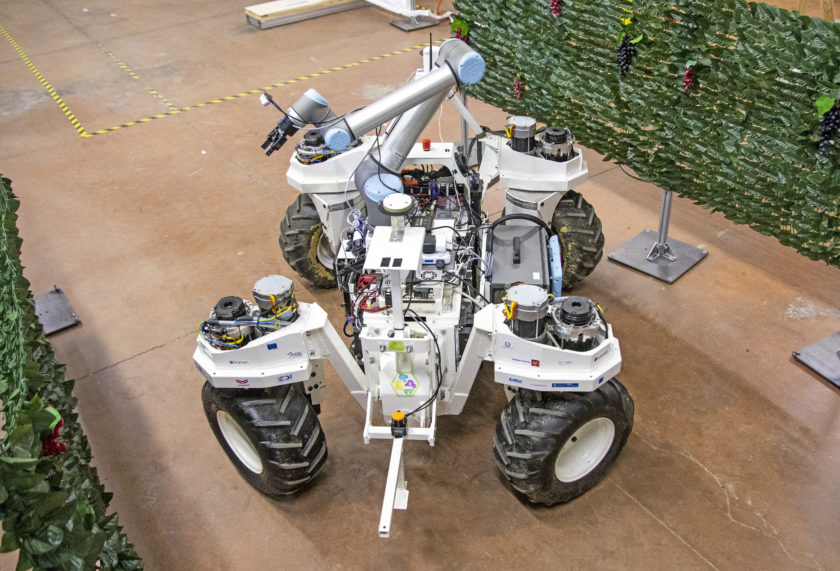
Il progetto ha visto già la realizzazione di due prototipi, uno in fase di testing all’interno di vigneti e uno presso una coltivazione di spinaci. Soprannominate “AgroRobot”, le macchine sono costituiti da una piattaforma semovente a propulsione elettrica recante un braccio robotico con manipolatore e un sistema di sensori ottici, oltre a un drone e a una postazione ausiliaria fissa per il rilevamento della posizione gps, fermo restando che il carro semovente secondo gli esperti Yanmar potrà essere equipaggiato anche con attrezzature di lavoro quali seminatrici, rastrelli o estirpatori. Tra le principali attività affrontate da Yanmar nella messa a punto dei prototipi la progettazione del software oltre all’integrazione e all’installazione di tutti i componenti presenti sul robot, un complicato assemblaggio di sistemi elettronici, cavi, sensori, camere alla cui messa a punto e fornitura hanno collaborato dieci aziende partner.

A muovere il tutto provvedono otto motori elettrici le cui azioni sono ovviamente coordinate da una specifica centralina sulla base delle informazioni ricevute dai sensori. Questi ultimi hanno rappresentato uno degli elementi più complessi della progettazione delle macchine essendo alla base delle loro possibilità di automazione. L’ambiente di lavoro degli “AgroRobot” è in effetti estremamente complesso e definito da un’elevata varietà di variabili, vuoi per la varietà delle coltivazioni vuoi per le differenti tipologie di suolo, vuoi per la possibile presenza di infrastrutture fisiche fisse o in movimento come risultano essere le persone o gli animali. Tutti elementi che devono essere considerati nella programmazione del sistema e in particolare nella parte che controlla la navigazione e la localizzazione della macchina nello spazio.

Si deve fare in modo che la macchina possa operare in autonomia senza dar luogo a danni di alcun tipo e ciò significa appunto dover tener conto di tutte le variabili al contorno. Altro problema che si è dovuto affrontare l’interdisciplinarietà del progetto che richiede il coinvolgimento di esperti e tecnici provenienti da differenti settori. Per rendersi conto della complessità del sistema basti pensare all’iter tecnologico che sta vivendo il segmento automotive per mettere a punto veicoli a guida autonoma. La gestione della navigazione in autonomia di un “AgroRobot” in tale ottica è solo uno degli aspetti strategici del progetto che deve essere integrato con l’automazione dei sistemi atti a svolgere le già citate operazioni di monitoraggio, analisi e di lavoro. L’obiettivo finale è la messa a punto di robot che possano lavorare 24 ore su 24 con un impatto ambientale inferiore rispetto a trattori e macchine agricole convenzionali, con costi di produzione altrettanto inferiori a fronte di rese superiori.
L’esperienza di “swarm intelligence”
Tra i partner di sviluppo del progetto “Smash” c’è anche il Dipartimento di Agricoltura dell’Università di Firenze che ha supportato le attività di ricerca in campo. Un contributo importante vista l’esperienza dell’Università nello studio dei sistemi di gestione delle coltivazioni con macchine autonome maturata di recente con la partecipazione al progetto “Rhea”, teso alla messa a punto di flotte di droni robot gestiti da algoritmi di “swarm intelligence” volti a eseguire monitoraggi e trattamenti per migliorare la qualità e la resa dei raccolti. Nello sviluppo del progetto “Smash” l’Università toscana ha contribuito a progettare i sistemi di gestione specifici per le culture su cui sono stati testati gli “AgroRobot” nell’ottica di ottimizzare i consumi di fitofarmaci nei trattamenti e migliorare i livelli di nutrienti e batteri utili alla crescita delle piante.






